






















AM32 ESC Development Board is an open-source solution for controlling brushless motors, with real-time debugging and safety features like overcurrent protection. It allows developers to optimize motor control performance through programming and debugging.
Firmware Support
Specification
| Component | Details |
|---|---|
| Power Supply | 2S – 4S |
| MCU | ST STM32L431KCU6 |
| Gate Drive | Fortior Tech FD6288 |
| MOSFET | AOS AON7544 |
| CAN Transceiver | NXP TJA1051 |
| Current Sensor | TI INA169 |
| Current Sampling Resistor | 0.3mΩ |
| Voltage Sampling Resistor | upper 30kΩ \| down 3.6kΩ |
| CAN Ports | 1 |
| CAN Termination | 120Ω with Solder PAD switch, default OFF |
| CAN Port Connector | Pixhawk Standard 4P CAN Port |
| Firmware | AM32 |
| Firmware Target (CAN Version) | VIMDRONES_L431_CAN |
| Bootloader Target (CAN Version) | AM32_L431_BOOTLOADER_PA2_CAN |
| Input (CAN Version) | DSHOT / PWM / DroneCAN |
| Telemetry (CAN Version) | DroneCAN uavcan.equipment.esc.Status — RPM | Temperature | Voltage | Current |
| Firmware Target (Standard) | VIMDRONES_L431 |
| Bootloader Target (Standard) | AM32_L431_BOOTLOADER_PA2 |
| Input (Standard) | DSHOT / PWM |
| Telemetry (Standard) | BDSHOT / EDSHOT — RPM | Temperature | Voltage | Current |
| Board Outline | 85mm × 35mm |
| Mount Hole | 4 * M3 (80mm × 30mm) |
| B1 Mount Hole | 4 * M3 (45mm × 30mm) |
| B2 Mount Hole | 4 * M3 (30mm × 30mm) |
| B2 Motor Mount Hole | 4 * M2 (8.5mm × 8.5mm) |
| Motor Model | 1404 |
| Motor KV | 4300 kV |
| Motor Mount | 4 * M2 (8.5mm × 8.5mm) |
| Motor Propeller Mount | 2 * M2 (5mm diagonal) |
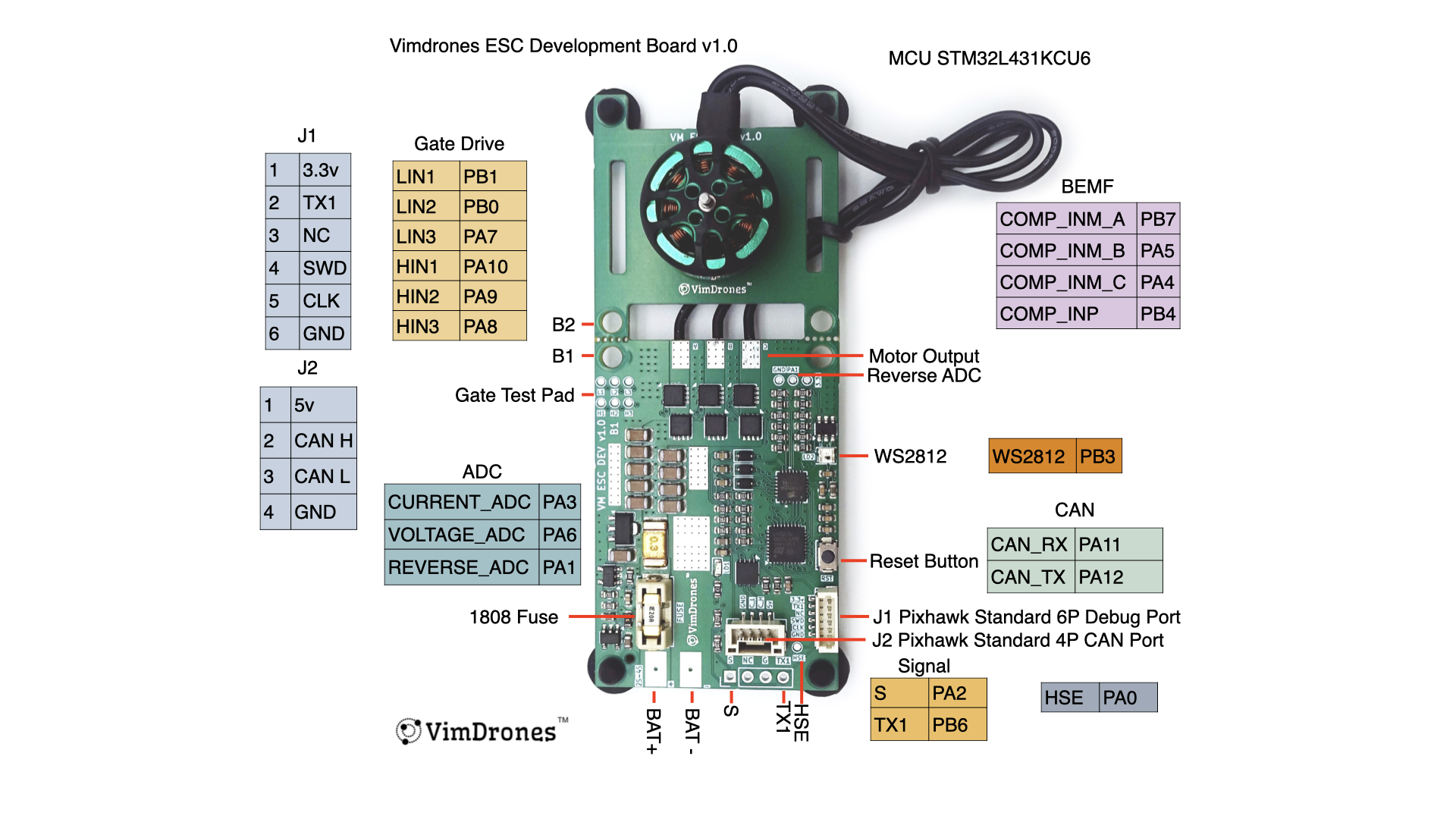
Pinout
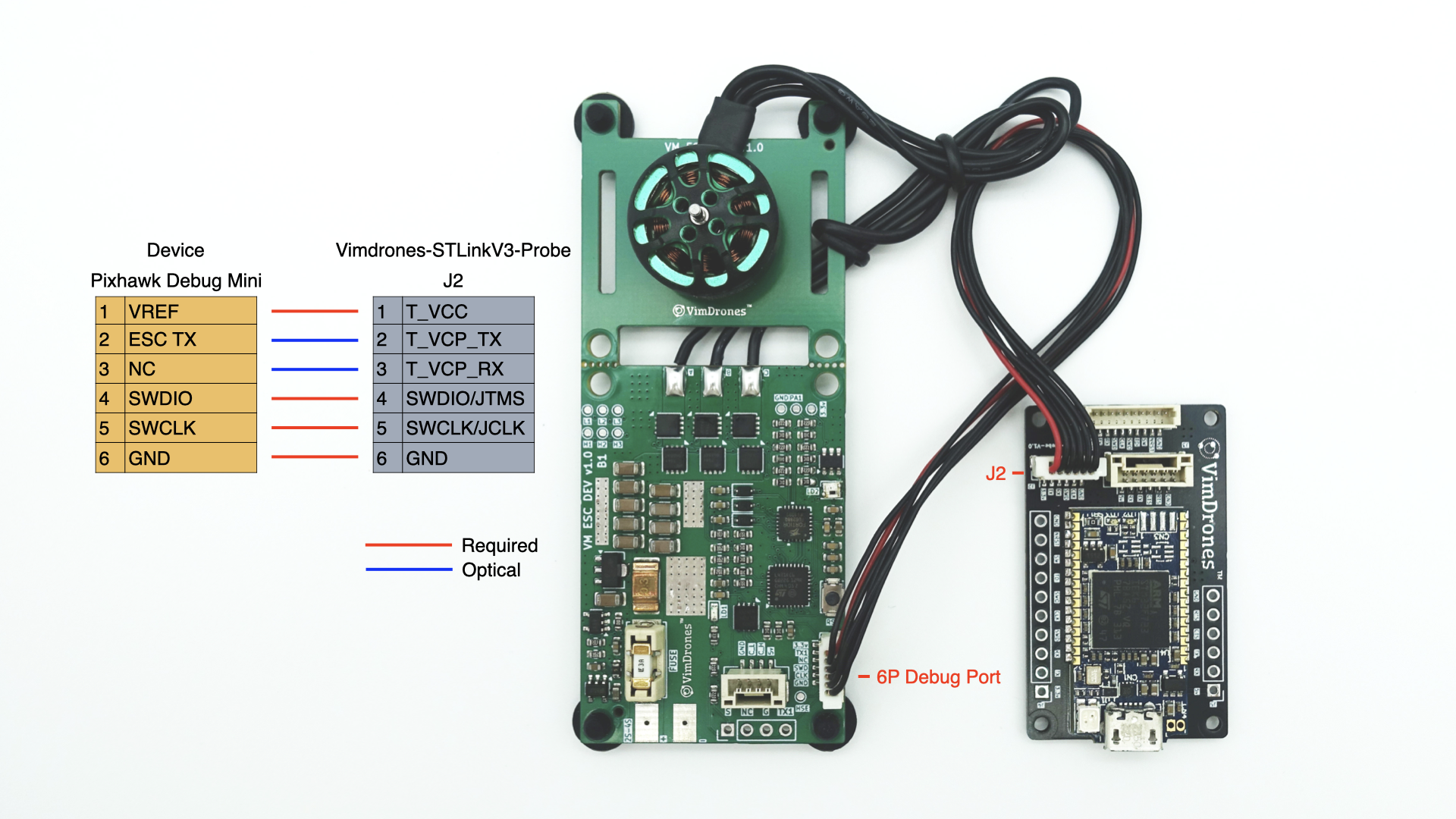
Debug Wiring
Getting Started
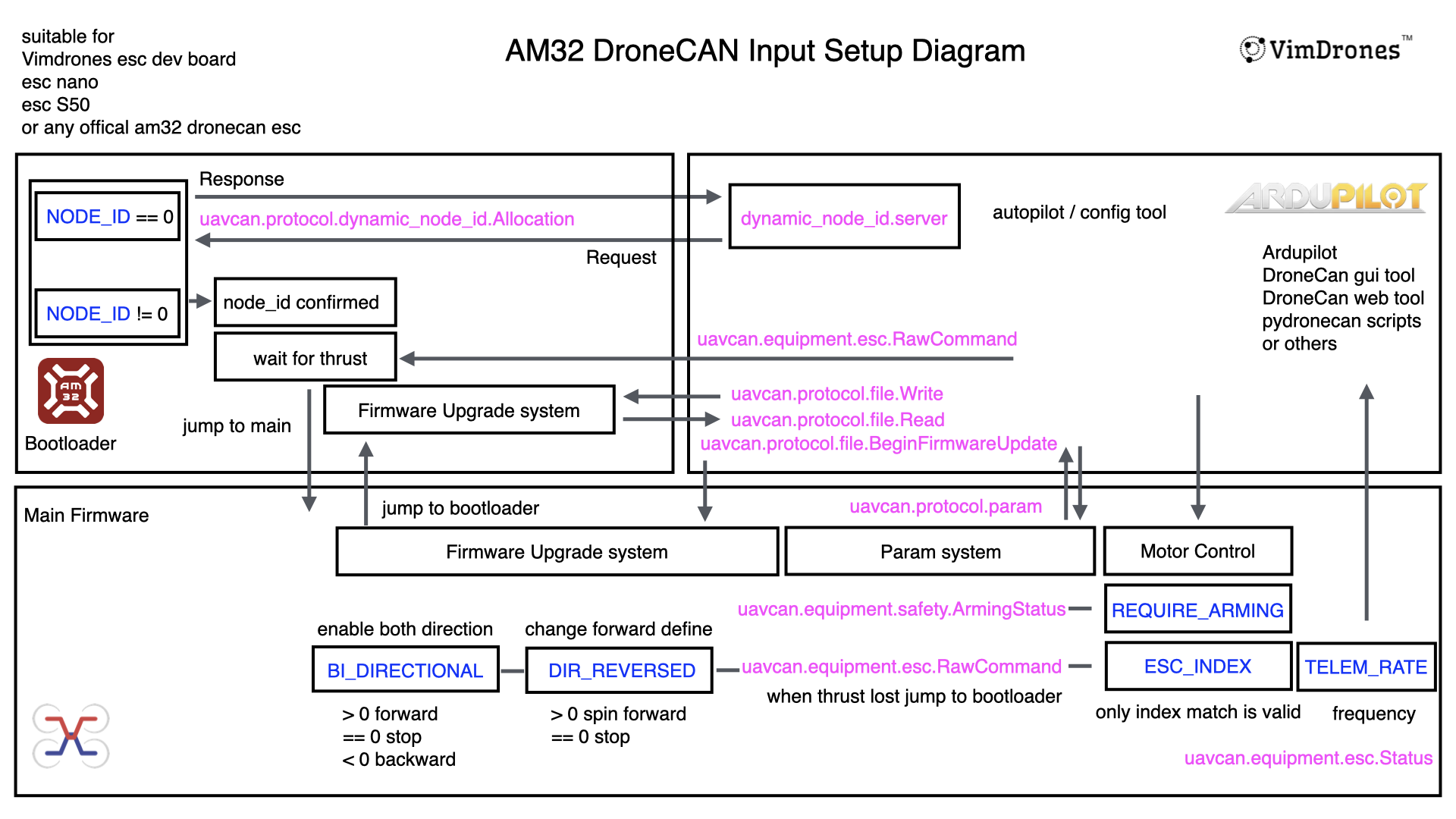
DroneCAN Input Diagram
Shipping List

Video